DSHOTテレメトリーを有効にしてPRMフィルターを導入

砂井さんの保有するマイクロドローンはBetaFPVの機体ばかりです。
お気に入りはHD撮影可能なXシリーズ。
85サイズの3Sと4S機がお気に入り。
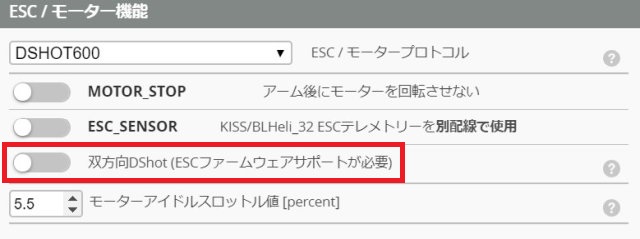
Betaflight 4.0から導入された双方向DSHOT設定は以前から気になっていました。
最初は高度なアクロバットが出来るワケでないので必須ではない、なんて思っていましたが、この設定で動きが滑らかになって飛行時間も伸びるらしい。
でも今まで設定してなかったんですよね。
理由は設定に必要なESCのファームウェアが有料だったから (;´Д`)
Beta85X HD 4Sの場合はESCファームウェアがBLHeli_32なので、バージョン32.7.0にアップデートするだけで設定は可能。
しかしそれ以外のマイクロドローンのESCファームウェアは全てBLHeli_S。
コレはJESCという有料ファームウェアを購入しなくてはいけなかったんですよ。
そんな訳でちょっと面倒じゃね?とか思って知らないフリをしていました。
しかし!なんとこの度Jazzmaverick版のBLHeli_S(通称BLHeli_M)というファームウェアなら無料で使用出来る、との情報を得たので俄然ヤル気が出て来たワケです。
ちょっと調べてみるとBLHeli_MにはBetaflightが互換性を確認しているバージョン16.73と、最新だけど互換性が確認出来ない16.9の2種類が存在します。
PRMフィルターだけ使用する場合は安定性の高い16.73を使用した方が無難らしい。
バッテリーの持ちをよくするといわれるPWM周波数48kHzや98kHzを設定したい人は16.9を使用しますが、Betaflightの推奨ではないので注意が必要です。
今回はPWM周波数を変更したいので16.9を選択しましたが、この設定だけなら互換性の問題は少ないみたいなのでチャレンジです。
BLHeliのアップデート
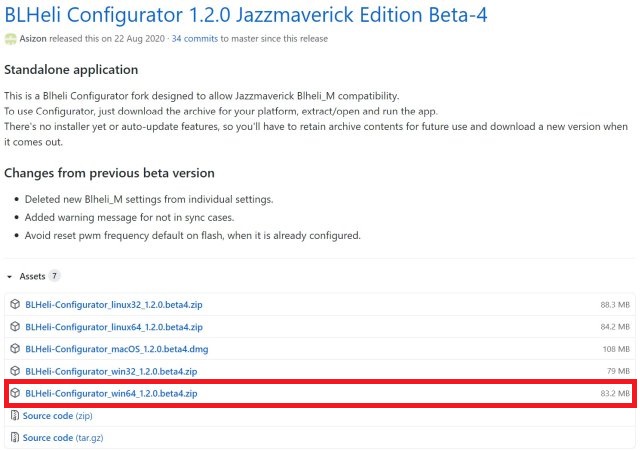
BLHeli_Mを使用するにはJazzMaverick版用のBLHeli Configuratorを使用します。
砂井さんはWindows環境なので「BLHeli-Configurator_win64_1.2.0.beta4.zip」を選択しました。
自分の環境に合ったヤツをダウンロードして解凍しておきます。
下準備

BLHeli設定中はバッテリーを繋ぐ必要がありますが、その際VTXの焼損を防ぐ為に小型の電動ファンで送風しておくと安心度が高い。
実際過去にVTXを焼いた事があるもんで (;´Д`)
アップデート開始

BLHeli-Configuratorを起動させ機体をUSB接続でPCと接続。
右上のConnectを押してから右下のRead Setupを押すと上記の画面になります。
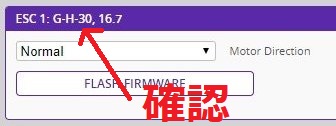
ESC 1:G-H-30, 16.7と確認出来ますね。
ESCファームウェアのターゲット名がG-H-30でバージョンが16.7という意味です。
BLHeli_Mの最新バージョン16.9を使用する場合はそのままでOKですが、16.73にしたい場合はバージョンが古いファームウェアになるので別にダウンロードする必要があります。

/BLHeliの公式サイトから対応するファームウェアをダウンロードします。
砂井さん環境なら「G_H_30_REV16_73.HEX」になります。
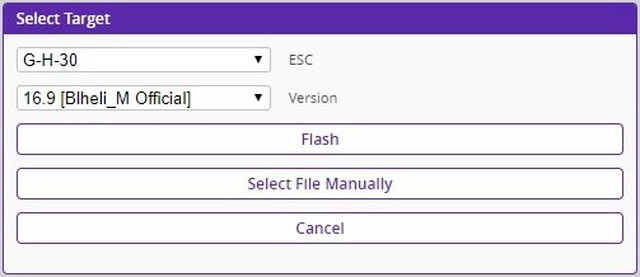
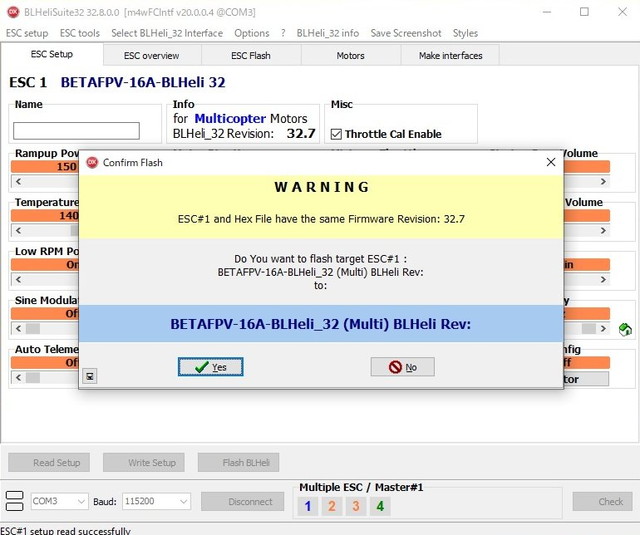
BLHeli-Configuratorに戻って右下のFlash Allボタンを押すとこのウィンドウが出て来ます。
ターゲット名とバージョンが間違いないか確認します。
16.73にする時はSelect File Manuallyを押して先程ダウンロードした拡張子.hexのファイルを選択。
ココロの準備まで終わったらFlashを押しますよ。
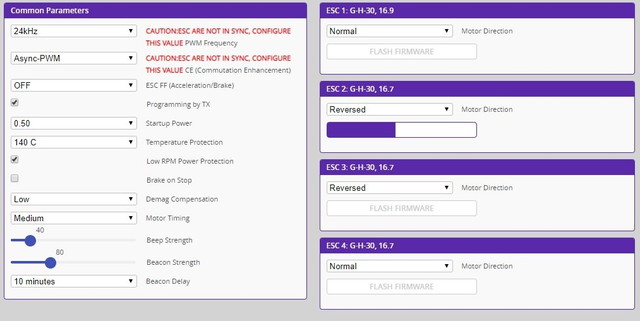
ESCファームウェアのアップデートを開始。
書き換え中は何やら赤文字の警告が出てきてちょっと焦りますが、4個のESCのバージョンが一時的に違う為に起きるモノなのでアップデートが終われば消えます。

アップデートが無事に終了しました。
バージョンが16.9になってるのを確認してBLHeli-Configuratorを終了してもイイ?
でもその前に
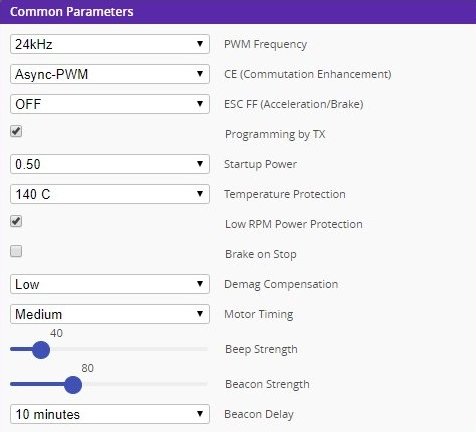
バージョンが16.9の場合は更に有効なオプションを選択出来ます。
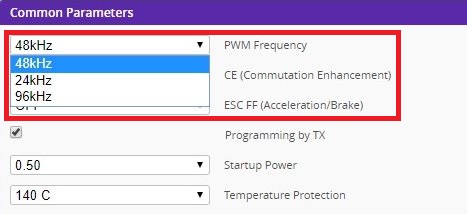
16.9からPWM周波数を変更する事が可能になりました。
実はこの機能が使いたいが為にアップデートしたと言っても過言ではありません。
PWM周波数を高く設定すると、電力効率が良くなりバッテリーの持ちが30%ほど長くなるらしい。
3インチ以下のマイクロドローンで使用される小型のブラシレスモーターなら48kHzが一般的な数値だと言われています。
96kHzは0803みたいなもっと小さいモーターがターゲット。
なので砂井さん保有機は全て48kHzにしました。
BetaflightでDSHOTテレメトリーを確認
早速Betaflightを起動して意気揚々と双方向DSHOTを有効にします。
・・・(* ̄- ̄)・・・
アレ?(。´・ω・)?
有効にならないね?(;´・ω・)
再起動する度に無効になってしまいます。
有効化する条件は全て満たしているハズなのに!

でもCLIコマンドラインから直接入力したら有効になりました。
set dshot_bidir=on
save

ちっ( ゚д゚)、焦らせやがって。
モーター極数の設定が必須になるので実際のモーターを見て数えますが、マイクロドローンなら殆ど12だと思います。
その他CPUの負荷を下げる為にモータープロトコルをDSHOT300に変更し、PIDループ演算周波数を4KHz にした方が良いみたい。
正直全部は理解していないので、ムリの無いおススメ設定をしています。
双方向Dshotの動作確認
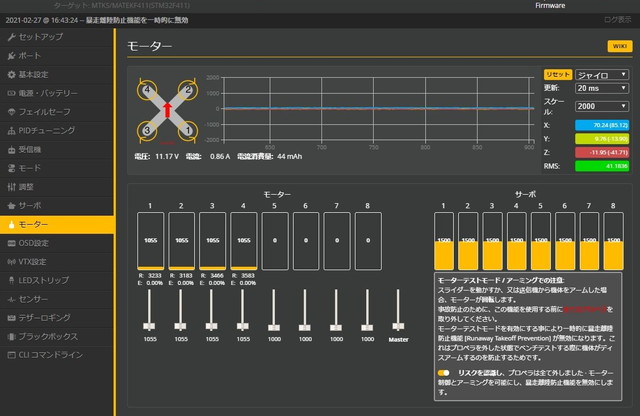
安全の為にプロペラを外しバッテリーを接続してスライダーでモーターを回転させます。
1055くらいのアイドル回転まで上げて、このままCLIコマンドラインに行きます。
CLIコマンドラインから
dshot_telemetry_info
と入力すると↓
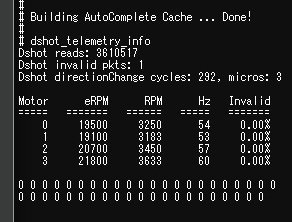
DSHOTテレメトリーが表示され、双方向DSHOTが有効になっている事を確認出来ました。
モーターの回転数がRPMで表示されています。
Invalid の数値が1%を越えるとヤバイらしいので超えていない事を確認してください。
ちなみにこの時のCPU使用率は27%でした。
EXIT
と入力するとモーターが停止します。
今回は双方向DSHOTが有効にするまでにしておきます。
コメントする